
AMRと安全
AMR AND SAFETY
MiR TOP / AMR入門 / AMRと安全
AMR入門vol.3
AMR導入に必要不可欠な安全方策について
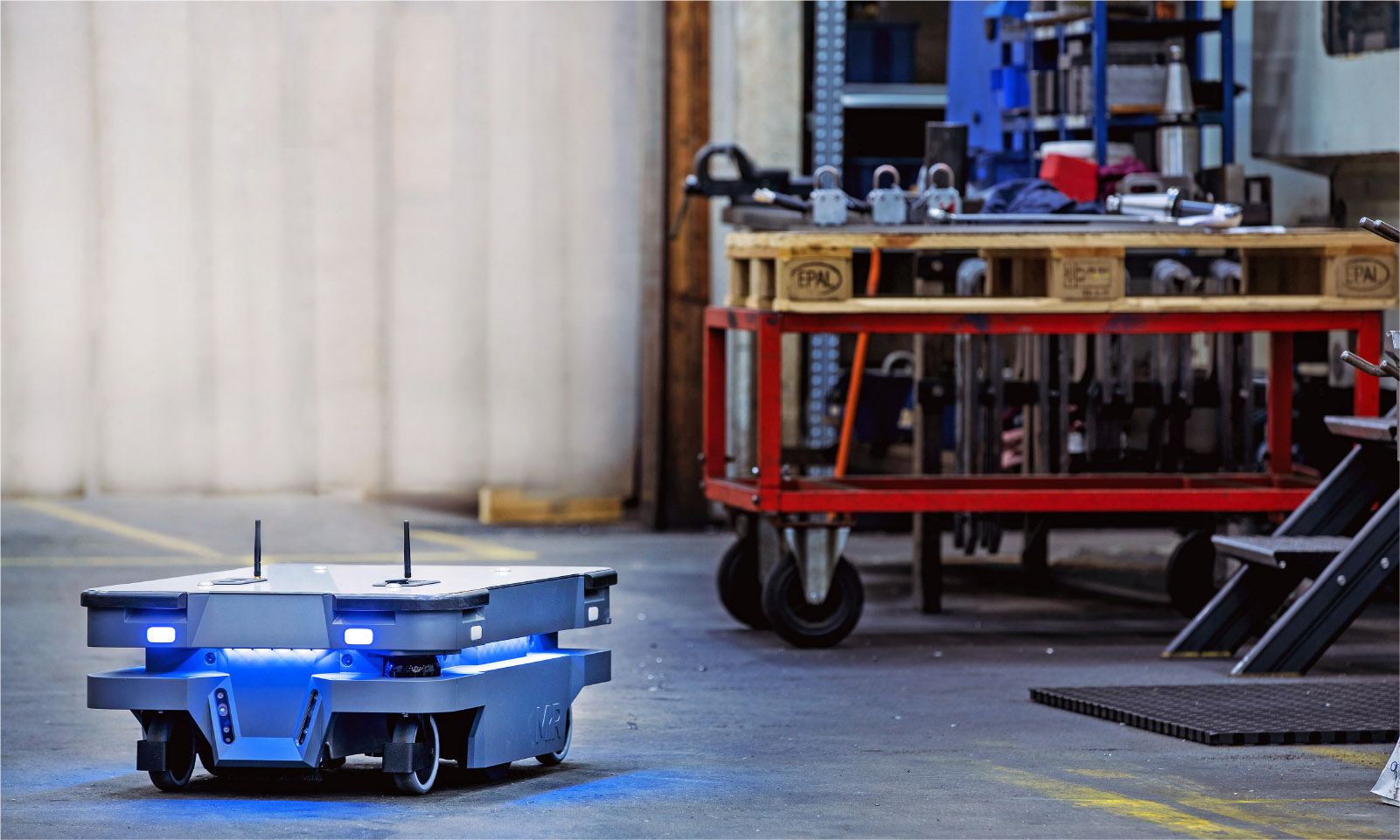
AMRが、その稼働領域を人と共存・共用する以上、安全性の確保は 非常に重要なものとなります。
無人搬送車の安全性については、ISO3691-4/JIS D 6802「無人搬送車及び 無人搬送車システム – 安全要求事項及び検証」で規定されています。そこには、無人搬送車には、安全方策として、人や障害物と接触した際にAMR を停止させる圧力検知用バンパや、人や障害物への接近を検知するレーザ スキャナ、非常停止装置などの安全機器、指定条件で警報を発する装置の 搭載が要求されています。また、ブレーキや速度制御機能も安全機能とし て挙げられています。AMRにはこれらの機能の搭載が必要です。
しかしながら、システムとして実際の運用を考えた際には、安全機能を稼働環境に応じて適切に使用しなければなりません。
走行環境、周辺設備との連携や作業者の動線の考慮など、人との協働作業空間特有の危険源・危険事象への対応が必要になります。
また、協働作業空間では、安全性だけを検討しても、設備運用効率も考慮しなければ設備導入は成功しません。
安全性と生産性を両立させた最適な環境を実現するためには、安全方策と現場における運用規制の両面から、メーカー、SIer、使用者が協議し、安全を確保しつつ生産性も考慮して慎重に対処することが必要です。 そのための基本となるのが、リスクアセスメントです。
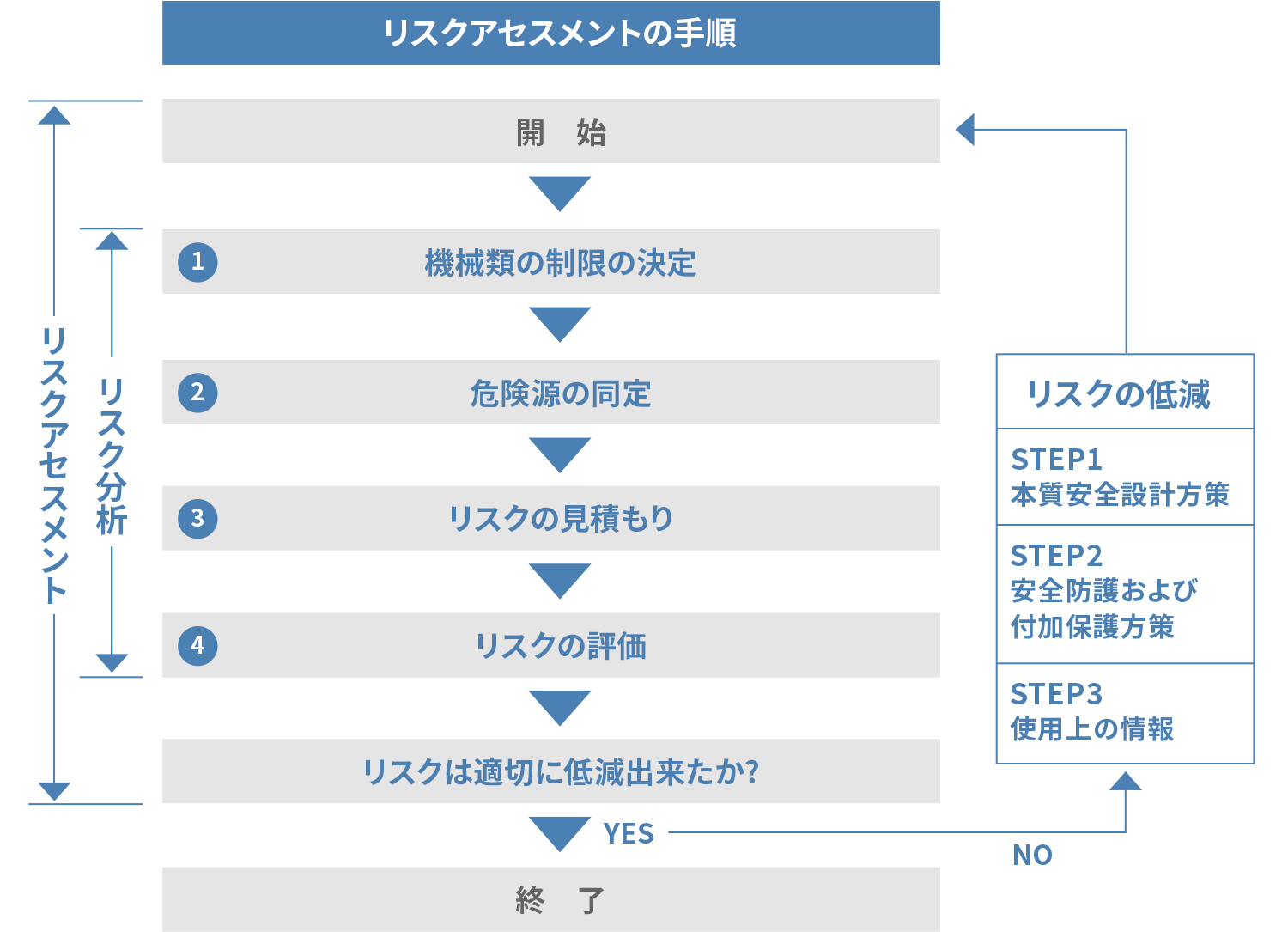
リスクアセスメントとは
リスクアセスメントとは、設備運用前に設備の持つさまざまな危険な個所 や危険な動作(危険源)を見つけ出し、それによって引き起される労働災害の重大さを予想して危険源の持つリスクの大きさを見積もり、そのまま放置してもよいかどうかを判断する手法です。その結果に基づき、重大事故につながる可能性のある危険源から順に安全方策を講じていきます。
リスクアセスメントと安全方策に関しては「危険性・有害性等を調査し、 その結果に基づいて必要な措置を講ずるよう努めなければならない(本文 概略)」として労働安全衛生法(二十八条の二)に、努力義務として定め られています。
特に現代においては多様な設備、物質が使用され、それに応じて危険性・ 有害性も多様化していますので、何がリスクとなるのか、その見極めと優先度の選定、そして対策を行うことが大切です。
AMRが人と稼働領域を共有する以上、協働ロボット同様、リスクアセスメントは非常に重要です。
安全なAMRシステム構築のために
安全なAMRシステムを構築するためには、AMRメーカー、AMRシステムのインテグレーター、およびエンドユーザー間の協力が必要不可欠です。
〈それぞれの役割〉
AMRメーカー
AMRシステムに組み込むことを前提にした安全なAMRを提供する。
AMR システムのインテグレーター
稼働環境に適切な安全機能を持つAMRの選択とエンドユーザとのリスクコミュニケーションによる
安全で運用効率の高いAMRシステムを構築する。エンドユーザー
インテグレーターとのリスクコミュニケーションで決定した、安全で運用効率の高いAMRシステム運用を実践する。
