搬送自動化コラム vol.7
AMRとエレベータの連携で実現するフロア間搬送の自動化|安全設計と関連ガイドラインのポイントを解説


はじめに
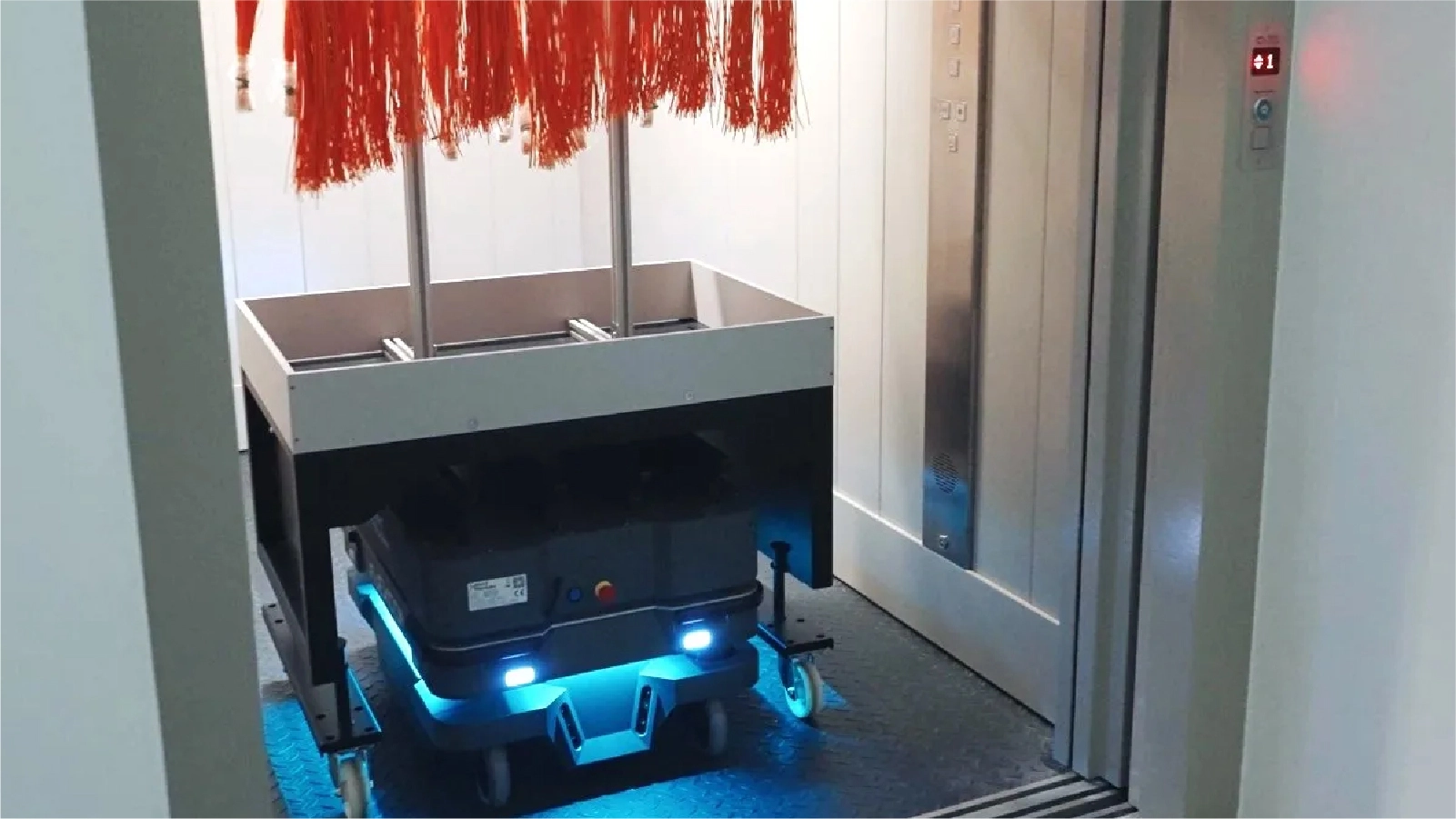
前回のコラム(https://idec-fs.com/mir/column/column-6)では、AMRとエレベータを連携させ、フロア間搬送を自動化した事例と、それを実現するための技術的ポイントを紹介しました。
コラム内でも触れた通り、AMRとエレベータ連携の搬送自動化システムを構築する際は、「ISO 3691-4」をはじめとする国際規格に基づいたリスクアセスメントと安全対策が不可欠です。
しかしながら、AMRを含む無人搬送車及び無人搬送車システムの安全に関する国際規格「ISO3691-4」には、AMR-エレベータ連携システムの安全について、直接規定する項目はありません。また、日本国内には、リフトやエレベータについての法令は存在しても、AMR-エレベータの連携システムについて直接規定する法令はありません。
そのため、技術仕様は固まったにも関わらず、リスクアセスメントや安全対策の具体的なやり方が分からず進められないといったケースも実際に発生しています。
そこで今回は、製造現場の責任者や生産技術担当者、安全関係部署の皆様に向けて、導入検討時に押さえるべき「安全の考え方」の要点を解説します。
注釈:本記事は、当社が実際にインテグレーションを行う際に考慮しているポイントの簡易解説です。導入の際は、必ず最新の法令・規格・ガイドラインの原文を自社にてご確認ください。
AMR-エレベータ連携システム特有のリスクとは
まずは、AMR-エレベータ連携システムにおいて想定される危険事象を整理しましょう。
エレベータのかご内は、大抵の場合、それほど広くありません。そのため、人がAMRと共に乗った際、AMRが回避動作を行うスペースや人の逃げ場を確保することが難しいケースが発生します。また、エレベータのサイズによっては、かご内でAMRの人検知機能をミュートせざるを得ない運用も考えられます。
これらを踏まえると、主に以下のようなリスクが想定されます。
- 逃げ場のない空間における挟まれ・衝突リスク
- 荷崩れ・荷ズレによる押しつぶし
- 予期せぬ起動による人との衝突
- AMRがエレベータに乗り込む際に、搭乗者がエレベータかごとの間に挟まれる
- 人がいることを検出できず、そのまま衝突
こうした「特有の事象」に対し、どのような対策を講じるかが重要なポイントになります。
法令や国際規格がないからこそ、ガイドラインが重要
リフトやエレベータの安全に関係する法令・規格は存在します。まずは、これらを確認するところから始まります。主な法令は下記の通りです。
- 労働安全衛生法
- 建築基準法
- クレーン等安全規則
- 簡易リフト構造規格る
そして、AMRを使用した搬送自動化システムの安全を考える際は、AMRを含む無人搬送車及び無人搬送車システムの安全に関する国際規格「ISO3691-4」が重要になります。
規格の詳細については下記の記事をご参照ください。
https://idec-fs.com/mir/column/column-4/
以上のように、エレベータとAMRシステムのそれぞれの安全については規定する法令や規格が存在しますが、前述の通り、AMRとエレベータの連携システムを直接規定する法令や国際規格は現状存在しません。
そのため、2026年現在においては、上記法令や国際規格「ISO3691-4」の内容を踏まえた上で、国内の関連業界団体が発行するガイドラインを参照しながら検討していくことになります。主なガイドラインは下記の通りです。
1.サービスロボットの運用が可能なエレベータの検査運用指針-ロボットビジネス推進協議会(2007年)
ロボットビジネス推進協議会(ロボット革命イニシアティブ協議会の前身)が発行。サービスロボットがエレベータに乗降する際、エレベータかご内にサービスロボットと一般利用者は同乗しないことを想定した指針です。
サービスロボット向けの指針ですが、製造現場におけるAMR導入の参考にもなります。
2.人と同乗するサービスロボットの運用が可能なエレベータの検査運用指針-ロボットビジネス推進協議会(2009年)
上記と同様にサービスロボットがエレベータに乗降する場合に適用する指針です。ただしこちらは、人とサービスロボットの同乗を想定しており、サービスロボットについても「適用するサービスロボットは駆動電源を遮断しても安定性を保つことができ、ロボットには人が搭乗しない自動運転型」という前提が適用されています。
3.AGV-エレベータ 連携通信標準化仕様に関するガイドライン JIVAS A11-一般社団法人日本産業車両協会(2022年)
フォークリフト、無人搬送車(AGV/AMR)システム等の産業車両及び関係部品メーカー、道路運送車両法による特殊自動車メーカーなどにより構成される団体から発行されたガイドラインです。
JIS D 6801で定義された無人搬送車・無人搬送車システムが、エレベータに乗車し移動する際の、AGVとエレベータとの通信に関する基本的な仕様について記載されています。本記事で紹介するガイドラインの中では実際の製造現場における運用に最も近い内容です。
エレベータかご内に無人搬送車と一般利用者が同乗しない前提で構成されています。
4.ロボット・エレベーター連携インタフェイス定義 RFA B 0001 : 2025-一般社団法人ロボットフレンドリー施設推進機構(2025年)
サービスロボットの導入や、ロボットフレンドリー環境の構築の支援のため発足した団体が発行する最新の規格です。安全なロボット・エレベータ連携システムの速やかな構築を目的とするロボット・エレベーター連携インターフェイスを定義しています。
エレベータかご内にロボットと一般利用者が同乗する前提で、主にサービスロボットを想定した内容ですが、製造現場でも役立つ内容が記載されています。

導入検討時に押さえるべき安全の要点
これらのガイドラインを紐解くと、
- エレベータかご内における人と無人搬送車(ロボット)の同乗を想定するかどうか
- エレベータかご内で人と無人搬送車(ロボット)が同乗する、もしくは同乗してしまった場合、どのように安全を確保するか
- 無人搬送車(ロボット)がエレベータを使用する際に、かご室内ボタンなどの操作系の制限をどうするか
が主なポイントになっていることが分かります。
当社IDECファクトリーソリューションズでは、こうした各ガイドラインの内容と、これまでのAMRシステム構築の経験、関連した法令・国際規格に基づく安全の知識を併せてエッセンスとして取り出し、エレベータ-AMR連携システムの3つの基本方針を軸にシステムを設計しています。
これらの3項目を満たした上で、AMRシステム全体を対象としたリスクアセスメントを実施し、お客様にシステムを納入しております。
方針1エレベータかご内での“人とAMRの同乗禁止”を原則とする
本記事の冒頭で紹介した通り、エレベータ-AMR連携システムの特有の危険源は、エレベータかご内で人とAMRが同乗することと大きな関連性があります。
そのため、製造現場のAMR導入においては、まずは同乗禁止をシステム設計時の基本方針としています。
方針2人とAMRを同乗させないための運用設計
AMRがエレベータを使用している時は、人によるエレベータの呼び出し、行先階設定などの操作を無効化するAMR専有運転モードを実装。人が物理的に乗り込めない運用を行います。
また、AMRが乗り込んでいる時はエレベータかご内を消灯する、音声や表示器で専有運転モードであることを知らせる警告や表示を行うことで、誤って乗り込むことを回避します。
方針3万が一同乗しても安全を確保できる仕組みを用意
どれほど対策をしても、人とAMRがエレベータかご内で同乗してしまう可能性はゼロではありません。そのために、人側が危険を感じた際に使用できるよう、AMRの搭乗中も、エレベータかご内の扉開ボタンや非常停止スイッチは常に有効にしておきます。
おわりに
AMRとエレベータの連携によるフロア間搬送は、技術仕様の検討と安全要件の整理の両輪がそろって初めて、安定した運用が成立します。
特に安全設計はプロジェクトの初期段階から組み込むことが重要です。技術面だけで先行してしまうと、後から安全要件が満たせないことが発覚し、大幅な手戻りが発生するリスクがあるからです。
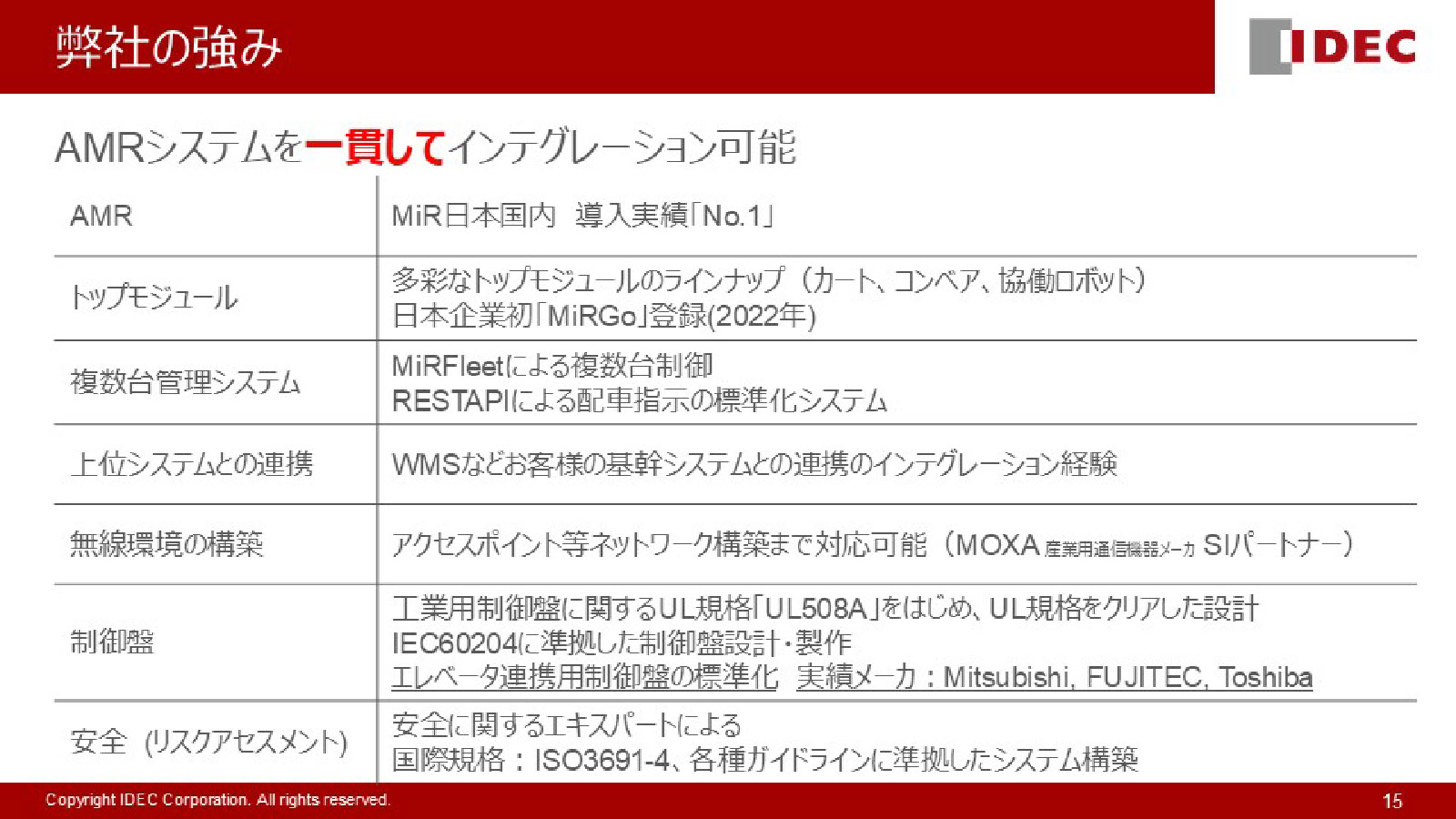
当社IDECファクトリーソリューションズは、安全面のサポートから制御盤製作、AMRシステム構築まで一貫して対応できるSIerです。
AMRの導入を検討中の方や、多層階にまたがる工場の搬送自動化に課題をお持ちの方は、ぜひお気軽にご相談ください。貴社の現場に最適な、安全で効率的な自動化プランをご提案いたします。