
- 06
ロボットの精度向上・
ティーチング簡易化ソリューション(オプション)
Option
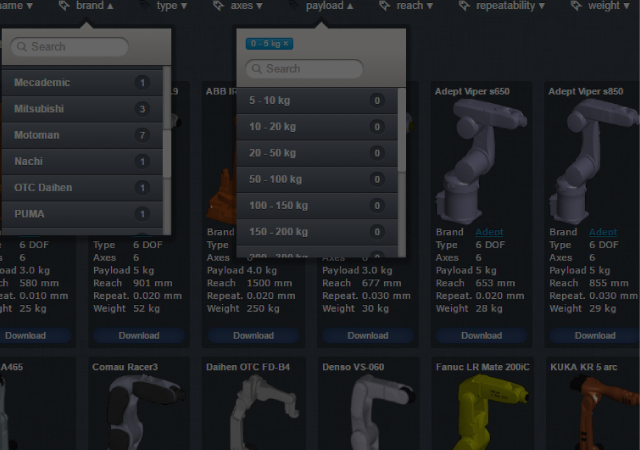
RoboDKは通常オフラインプログラミング用ライセンスに加え、ロボットの精度向上やティーチング作業の工数削減を実現するためのキャリブレーション機能を備えたライセンスもございます。RoboDKを使用して、ロボットを調整したり、正確なロボットプログラムを生成したりすることができます。

ロボットキャリブレーション
-
特徴
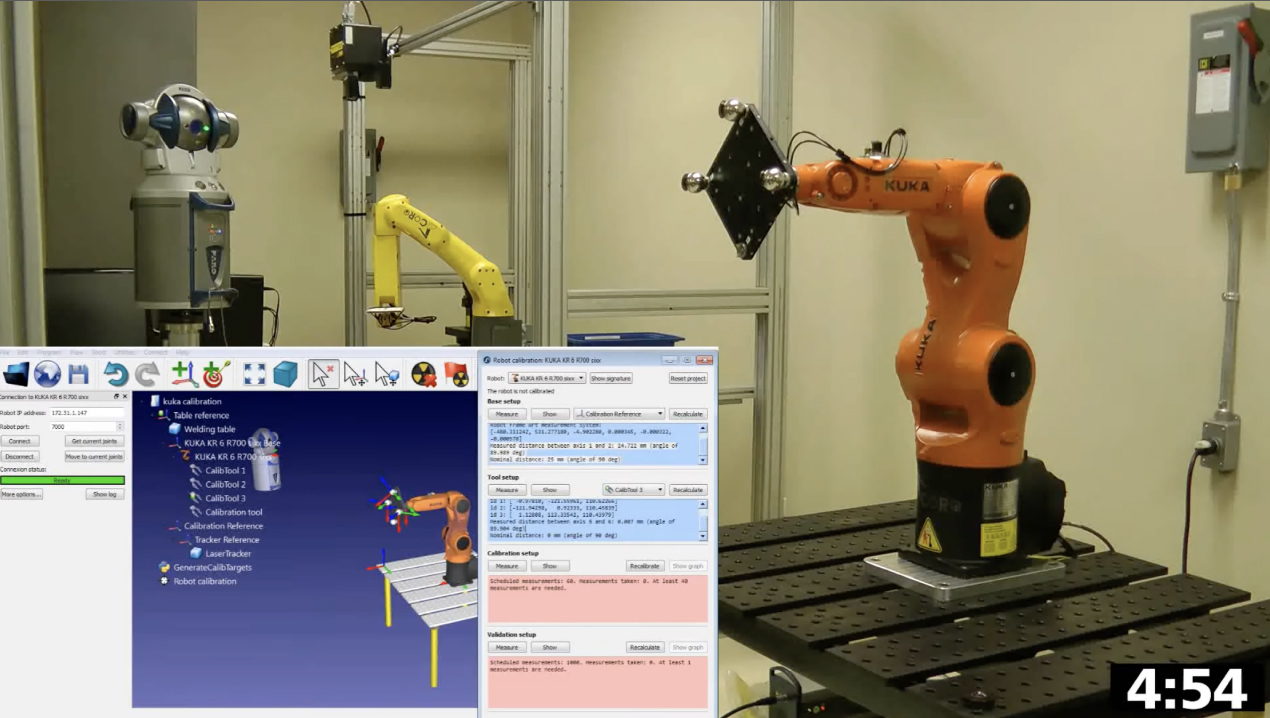
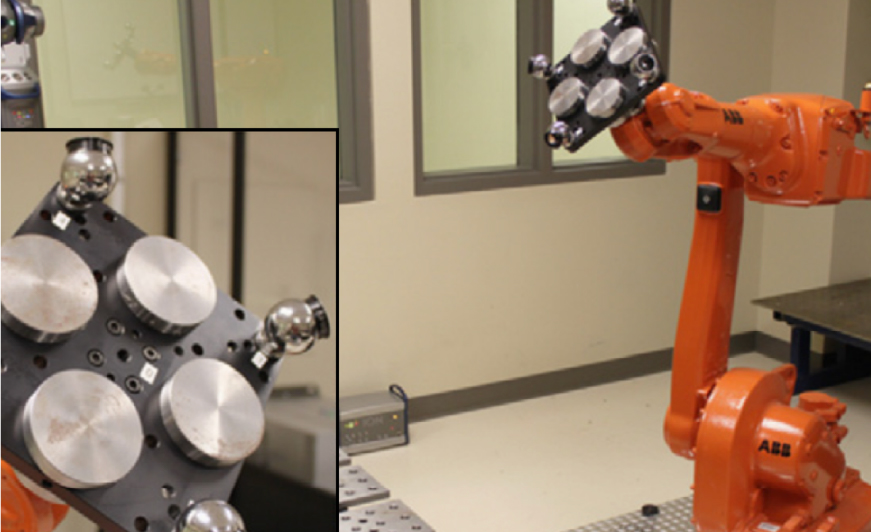
ロボットキャリブレーションは、ロボットの関節リンクの相対位置など、産業用ロボットの運動学的 構造における実際の幾何学的パラメータを推定するプロセスです。
推定したパラメータを使用し、シミュレーションを行うことでオフラインとオンラインでの差異が少なく なりロボットの精度が向上します。※ロボットのキャリブレーションにはレーザートラッカーなどの測定システムが必要です。詳しくはお問い合わせください。
ロボットボールバーテスティング
-
特徴
ボールバーテストは、 CNC装置(コンピュータ数値制御 装置)の性能をテストするために実施することができます。
産業ロボットに対してもボールバーテストは有効です。
ボールバーテストの実施により、ロボットのパフォーマンスと劣化を確認し、校正することが可能となります。 
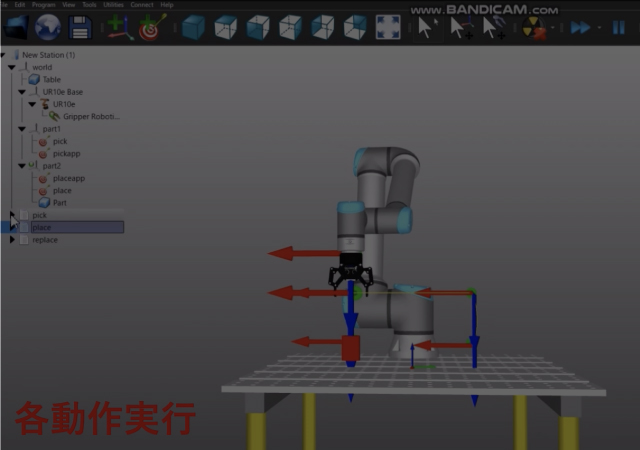
ISO9283 パフォーマンステスティング
-
特徴
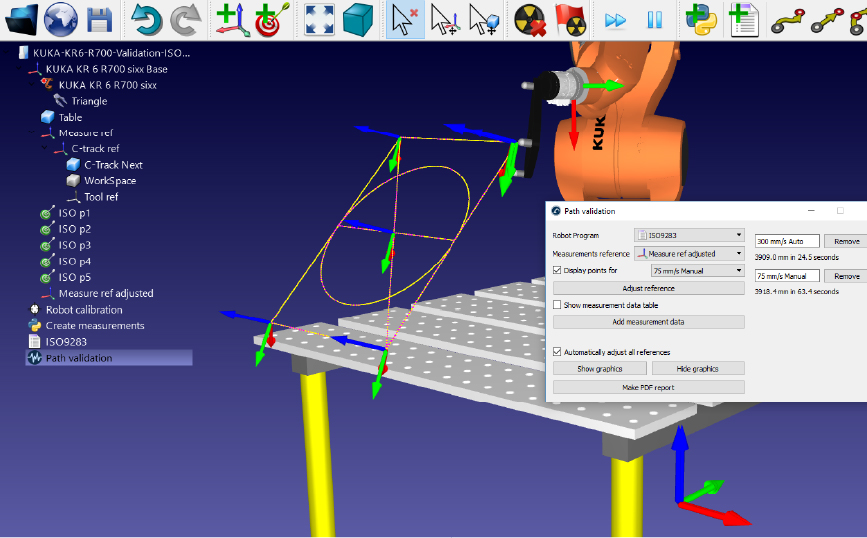
ISO9283 パフォーマンステスティングは、ISO9283で規定されている構成と推奨パスにてロボットの位置精度、再現性、パス精度を適切に測定するための手順を提供します。
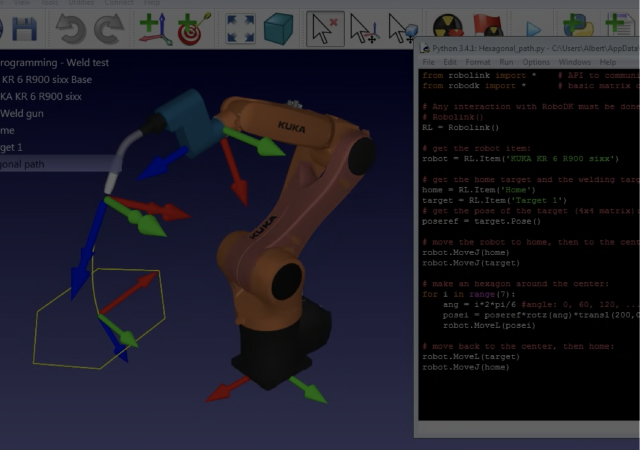
TwinTool(TCPキャリブレーション)
-
特徴
RoboDK TwinTool キャリブレーションを使用すると、TCP(ツール中心点)を自動的にキャリブレーションできます。
産業用ロボットは、動作の再現性は高いですが、実は位置精度の正確性にバラツキが生じています。
キャリブレーションを行わないと、位置精度は、ロボットブランドとモデルに依存しており、バラツキにつながります。 
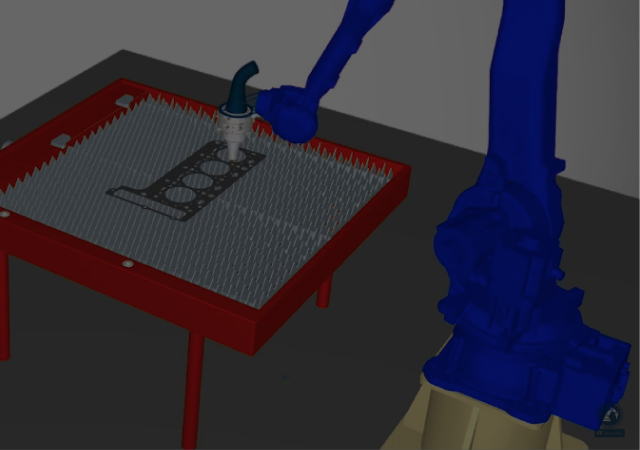
TwinTrack
-
特徴
RoboDK TwinTrack は、デモンストレーションによってロボットに動作を教える新しい方法を提供します。ロボットに人の動きを模倣させる形でロボットの動作プログラムを作成することが可能となります。
これにより、非常に細かなティーチング(教示)を必要とする塗装、研磨、バリ取り、ディスペンス、溶接などのアプリケーションのティーチング(教示)にかかる時間を大幅に短縮できます。