リスクの低減方法
ISO12100におけるリスクの低減方法は、機械リスク低減を目的としています国際規格では「保護方策」と呼んでいます。
リスクを許容できる範囲になるまで、この保護方策を実施します。
保護方策は、機械設備安全化を論理的に進められるように3(スリー)ステップメソッドと呼ばれる考え方に沿って、次のように実施します。
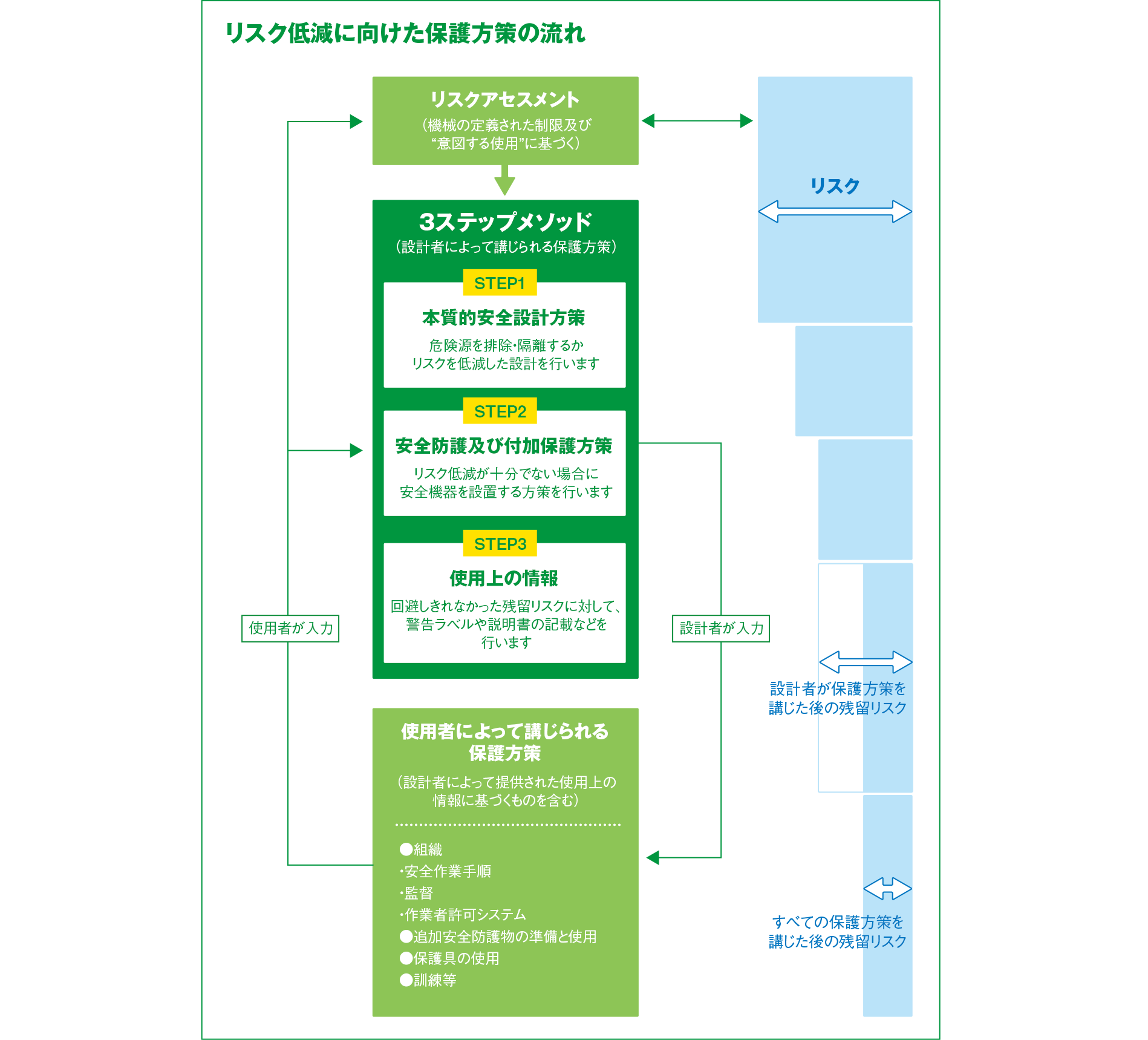
3ステップメソッド
1.本質的安全設計方策
2.安全防護および追加保護方策
3.使用上の情報
の3段階に分けて機械設備の安全化を進めます。
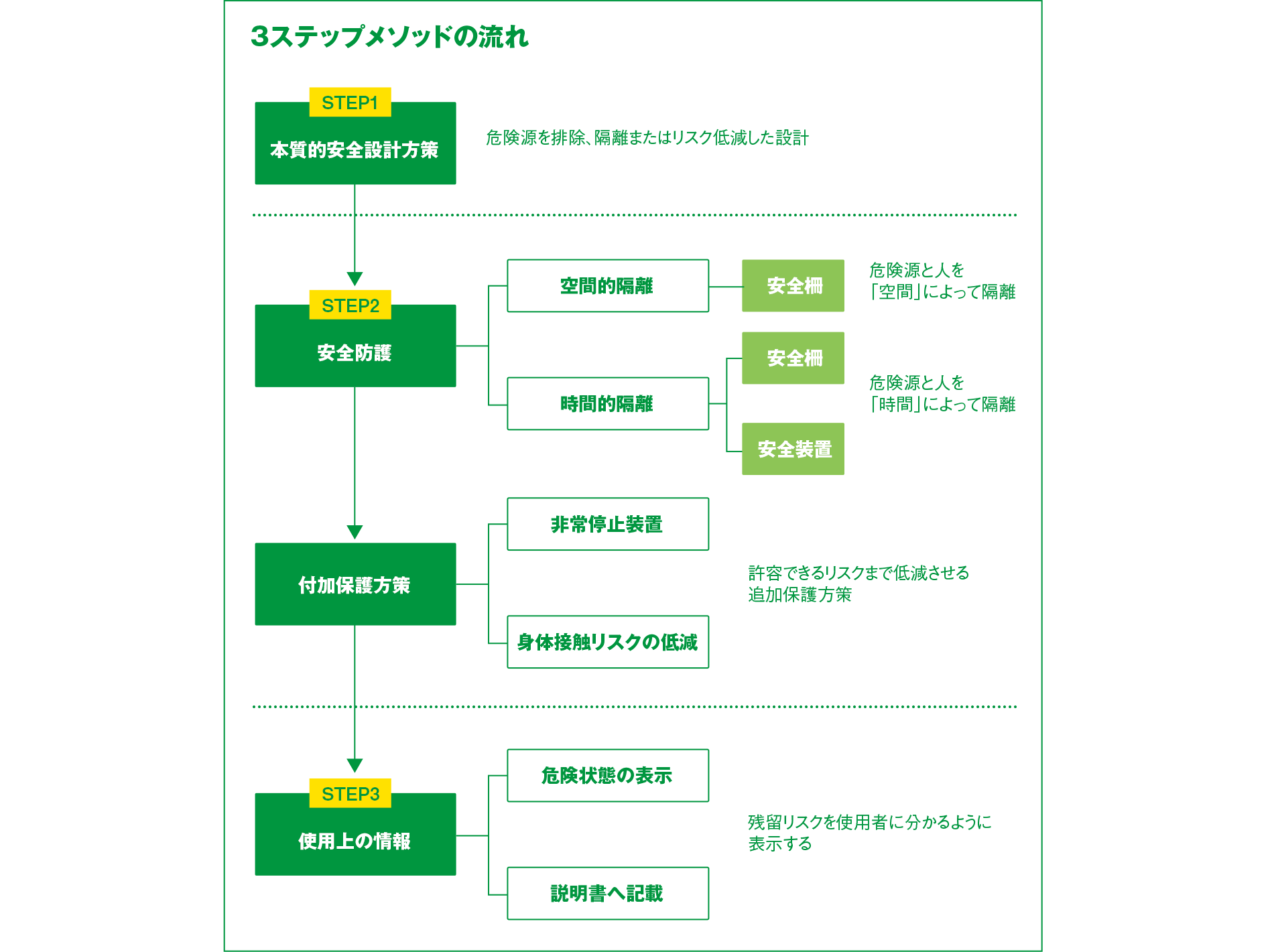
STEP1. 本質的安全設計方策
機械設備の構造を見直し、危険源となるものを排除や、力や速度などを制限するなどリスクをなくすもしくは低減する設計を行います。
STEP2. 安全防護
-
STEP1の本質的安全設計によるリスク低減では解決できない、もしくは十分でない場合、以下の保護方策を講じます。
1.空間的隔離
防護柵により危険源を完全に隔離する
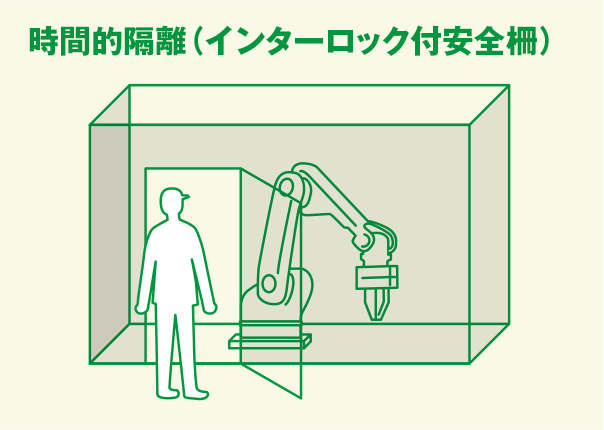
2.時間的隔離(危険源の停止による安全確保)
インターロック付き防護柵を設置する
・危険源をすぐに停止できる場合
ドアインターロックスイッチなどを設置・危険源をすぐに停止できない場合
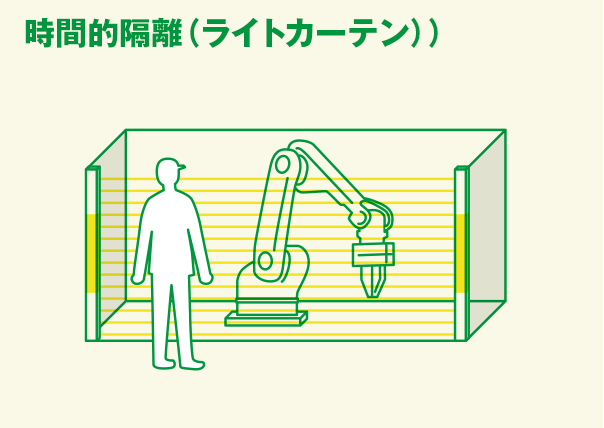
電磁ロック付ドアインターロックスイッチなどを設置・危険区域への人の侵入を検知させる場合
セーフティライトカーテンなどを設置・危険区域の人の存在を検知させる場合
セーフティレーザスキャナなどを設置 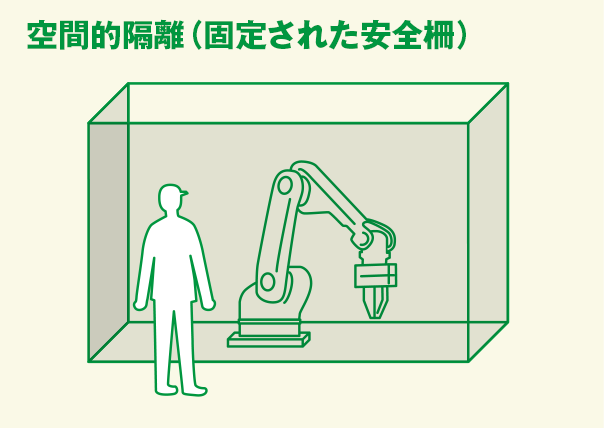
STEP3. 使用上の情報
リスクが完全に除去または低減しきれなかった場合(=残留リスク)に警告ラベルの貼付や説明書への記載などを行います。
保護方策を実施した際に、ドアーインターロック装置やセーフティライトカーテン、セーフティレーザスキャナなどを使用して時間的隔離による機械設備を停止することで安全確保しようとする制御による保護方策を選択した場合、機械設備を停止させる制御回路は、停止させる危険源のリスクに応じた設計をしなければなりません。
この回路は「制御システムの安全関連部(SRP/CS)」と呼ばれ、国際規格ISO13849-1に基づいて設計します。