
Robot Gripper2F-85/2F-140 アダプティブグリッパー
Robotiq TOP / 製品 / 2F-85/2F-140 アダプティブグリッパー

●協働ロボットでプラグアンドプレイ
●切替えを排除し、工具費を削減
●異なるサイズと形状の部品を選択可能
●1つのグリッパーですべてのアプリケーションを自動化
●数分でアプリケーションをプログラム
特長
協働ロボット向けに設計されています
●2つのワイドストロークオプション:85 mmと140 mm
●特許取得のフィンガーデザインにより、内部と外部の両方の平行把持が可能で、独特のグリップモードが 特長です。
プログラミングが簡単
●すべてのAdaptiveGripperモデル用に使いやすいソフトウェアインタフェース1つ
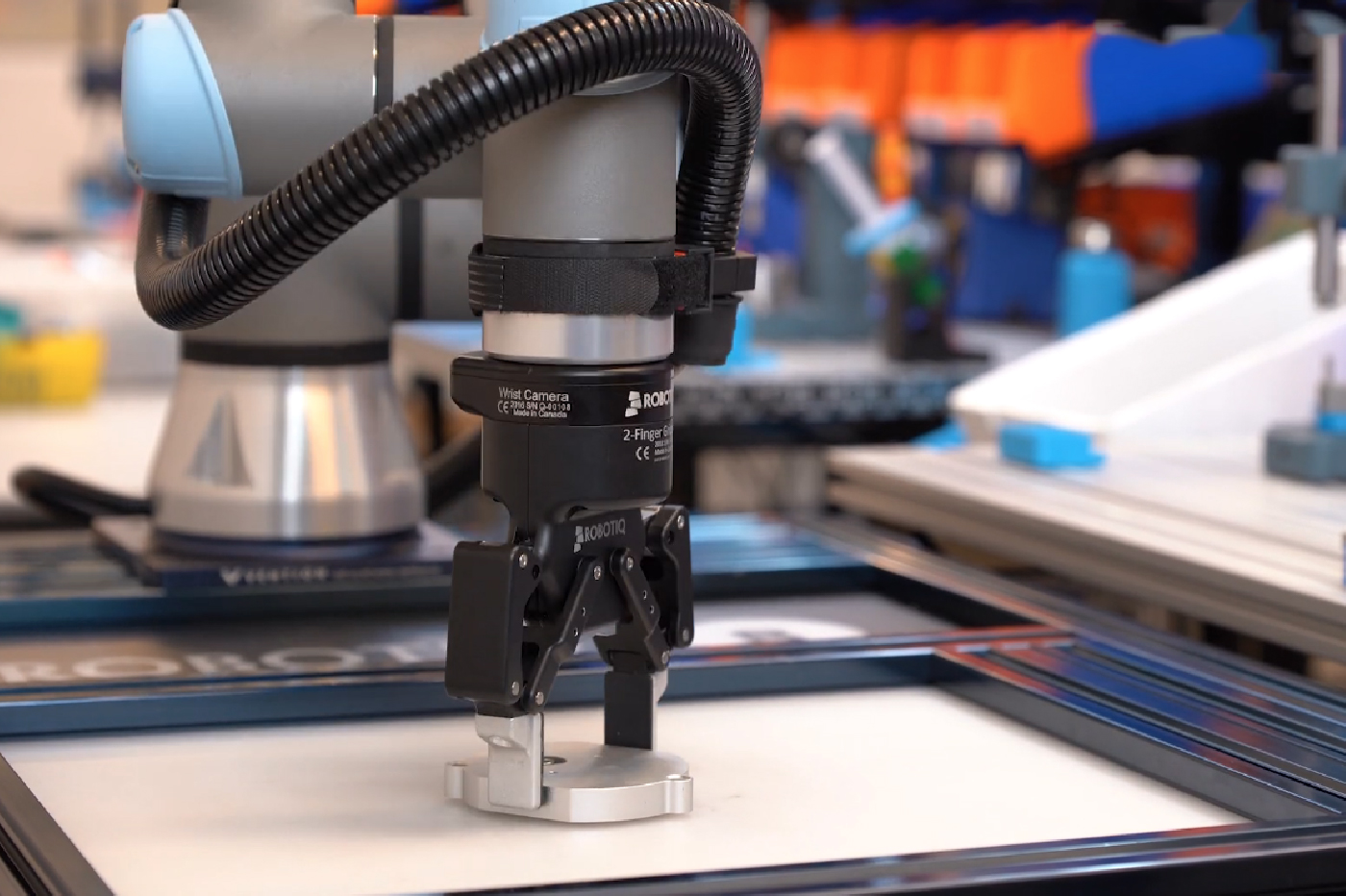
●グリップと寸法の検証機能が内蔵
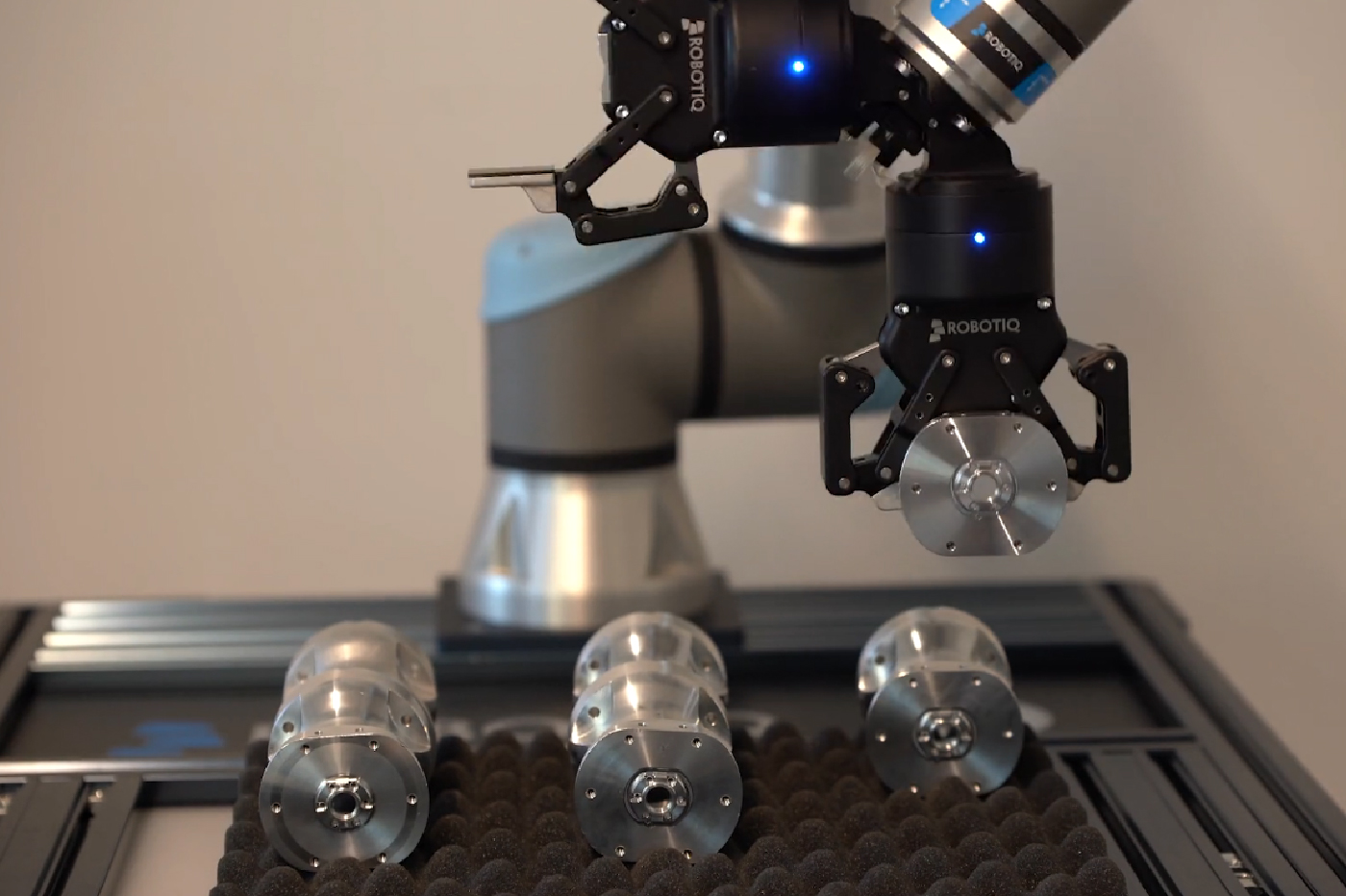
●部品の自動検出と位置フィードバックが可能
スーツの産業ニーズ
●丈夫で、工場で実績のあるハードウェア
●高いピンチ力とペイロード

仕様
| 詳細 | HAND-E | HAND-E C10 | 2F-85 | 2F-140 | 3-FINGER |
|---|---|---|---|---|---|
| 画像 |  |
 |
 |
 |
 |
| 可搬重量(平行把持) | 7kg | 10kg | 5kg | 2.5kg | 2.5kg |
| 可搬重量(包含把持) | − | − | 5kg | 2.5kg | 10kg |
| フィンガー全開幅 | Ø 50 mm | Ø 40 mm | 85 mm | 140 mm | 155 mm |
| 位置分解能(フィンガーチップ) | 0.2mm | 0.08mm | 0.4mm | 0.6mm | 0.05mm |
| 把持力 | 20~185N | 175N | 20〜235N | 10〜125N | 30〜70N |
| フィンガー閉速度 | 20~150 mm/s | 14~107 mm/s | 20~150 mm/s | 30~250 mm/s | 22~110 mm/s |
| 本体重量 | 1kg | 1.5kg | 0.9kg | 1kg | 2.3kg |
| IP等級 | 67 | 40 | − | ||
| デフォルト通信プロトコル | Modbus RTU (RS-485) | Modobus RTU(RS-485)、 RS-485、RS-232 |
Modbus RTU (RS-485) |
||
| オプション通信プロトコル※ | Erthenet/IP、Modbus TCP、Device Net、CANopen、PROFINET、EtherCAT | ||||
※ROBOTIQユニバーサルコントローラーを使用する場合、型式ごとにいずれか1つお選びいただけます。







